
Industrial robot control system composition and typical structure
First, the function of the industrial robot control system
The robot control system is an important part of the robot. It is used to control the manipulator to complete specific tasks. The basic functions are as follows:
1. Memory function: store job sequence, motion path, motion mode, motion speed and information related to the production process.
2, teaching function: offline programming, online teaching, indirect teaching. Online teaching includes both teaching box and instructional teaching.
3. Contact with peripheral devices: input and output interfaces, communication interfaces, network interfaces, and synchronization interfaces.
4, coordinate setting function: There are four coordinate systems: joint, absolute, tool, user-defined.
5, man-machine interface: teaching box, operation panel, display.
6, sensor interface: position detection, vision, touch, force and so on.
7. Position servo function: robot multi-axis linkage, motion control, speed and acceleration control, dynamic compensation, etc.
8. Fault diagnosis safety protection function: system status monitoring during operation, safety protection under fault condition and self-diagnosis of fault.
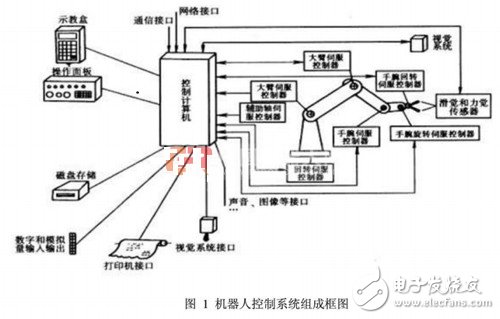
Second, the composition of the industrial robot control system
1. Control computer: The dispatching and commanding organization of the control system. Generally, the microcomputer and the microprocessor have 32-bit, 64-bit, etc., such as the Pentium series CPU and other types of CPUs.
2, teaching box: teaching robot's working track and parameter settings, as well as all human-computer interaction operations, has its own independent CPU and storage unit, and the host computer to achieve information exchange by serial communication.
3. Operation panel: It consists of various operation buttons and status indicators, and only performs basic function operations.
4, hard disk and floppy disk storage: storage peripheral memory of the robot working program.
5. Digital and analog input and output: input or output of various status and control commands.
6, printer interface: record the various information that needs to be output.
7, sensor interface: for automatic detection of information, to achieve robotic compliance control, generally for force, touch and vision sensors.
8. Axis controller: Complete the position, speed and acceleration control of each joint of the robot.
9. Auxiliary equipment control: Auxiliary equipment control for cooperation with the robot, such as the claw positioner.
10, communication interface: to achieve information exchange between robots and other devices, generally have serial interfaces, parallel interfaces.
11, network interface
1) Ethernet interface: It can realize direct PC communication of several stations or single robot through Ethernet. The data transmission rate is up to 10Mbit/s. It can directly use the Windows library function on the PC for application programming, and supports TCP/IP communication protocol. Load data and programs into each robot controller via the Ethernet interface.
2) Fieldbus interface: Supports a variety of popular fieldbus specifications, such as Devicenet, ABRemoteI/O, Interbus-s, profibus-DP, M-NET, etc.
Third, industrial robot control system classification
1. Program control system: By applying a certain regular control function to each degree of freedom, the robot can realize the required space trajectory.
2. Adaptive control system: When the external conditions change, in order to ensure the required quality or to improve the control quality by the accumulation of experience, the process is based on the observation of the state of the operating machine and the servo error, and then adjust the nonlinearity. The parameters of the model until the error disappears. The structure and parameters of such systems can be automatically changed over time and conditions.
3. Artificial intelligence system: It is impossible to compile the exercise program in advance, but it is required to determine the control effect in real time according to the obtained surrounding state information during the exercise.
4. Point type: The robot is required to accurately control the position of the end effector regardless of the path. ?
5. Track type: The robot is required to move according to the teaching trajectory and speed.
6, control bus: international standard bus control system. The international standard bus is used as the control bus of the control system, such as VME, MULTI-bus, STD-bus, PC-bus.
7. Custom bus control system: The bus used by the manufacturer to define the bus is used as the control system bus.
8, programming mode: physical settings programming system. The fixed limit switch is set by the operator to realize the program operation of starting and stopping, which can only be used for simple picking up and placing work.
9. Online programming: The programming process of the memory process of the operation information is completed by the teaching of the person, including the direct teaching simulation teaching and the teaching box teaching.
10, offline programming: not directly teach the actual working robot, but away from the actual working environment, teaching procedures, through the use of advanced robots, programming language, remote offline generated robotic trajectory.
Fourth, the robot control system structure
The robot control system can be divided into three categories according to its control method.
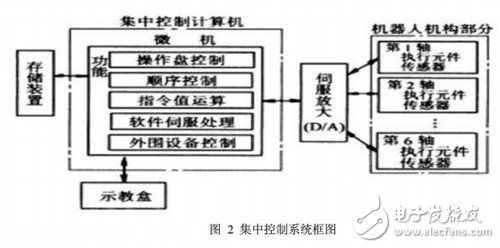
1) Centralized Control System: Centralized Control System: It realizes all control functions with one computer. It has simple structure and low cost, but its real-time performance is poor and it is difficult to expand. This structure is often used in early robots, and its block diagram is shown in Figure 2. . PC-based centralized control system makes full use of the openness of PC resources, which can achieve good openness: multiple control cards, sensor devices, etc. can be integrated into the control through standard PCI slots or through standard serial ports and parallel ports. In the system. The advantages of the centralized control system are: lower hardware cost, easy information collection and analysis, easy to achieve optimal control of the system, better overall and coordination, and PC-based system hardware expansion is more convenient. The shortcomings are also obvious: system control lacks flexibility, control danger is easy to concentrate, and once it fails, its impact is wide and the consequences are serious; due to the high real-time requirements of industrial robots, when the system performs a large amount of data calculation, it will reduce the system real-time. The system's ability to respond to multiple tasks will also conflict with the real-time nature of the system; in addition, the complexity of the system connection will reduce the reliability of the system.
2) Master-slave control system: The master and slave two-level processor are used to realize all the control functions of the system. The main CPU implements management, coordinate transformation, trajectory generation, and system self-diagnosis: it controls the motion of all joints from the CPU. Its block diagram is shown in Figure 3. The master-slave control mode system has good real-time performance and is suitable for high-precision and high-speed control, but its system has poor scalability and difficult maintenance.

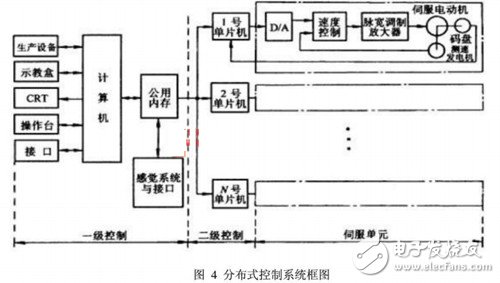
3) Distribute Control System: According to the nature and mode of the system, the system control is divided into several modules. Each module has different control tasks and control strategies. Each mode can be a master-slave relationship or an equality. relationship. This method has good real-time performance, is easy to implement high-speed, high-precision control, is easy to expand, and can realize intelligent control. It is a popular method, and its control block diagram is shown in FIG. 4 . The main idea is “decentralized control, centralized managementâ€, that is, the system can comprehensively coordinate and allocate its overall goals and tasks, and complete the control tasks through the coordination of subsystems. The whole system is functional, logical and physical. It is distributed, so the DCS system is also called a distributed control system or a distributed control system. In this structure, the subsystem is composed of a controller and different controlled objects or devices, and each subsystem communicates with each other through a network or the like. The distributed control architecture provides an open, real-time, and accurate robot control system. Two-level control is often used in distributed systems.
A two-level distributed control system usually consists of a host computer, a lower machine, and a network. The upper computer can carry out different trajectory planning and control algorithms, and the lower computer performs research and implementation of interpolation subdivision and control optimization. The upper computer and the lower computer work in coordination with each other through the communication bus. The communication bus here can be in the form of RS-232, RS-485, EEE-488 and USB bus. Now, the development of Ethernet and fieldbus technology provides robots with faster, more stable and more efficient communication services. Especially the field bus, it is applied to the production site, realizes bidirectional multi-node digital communication between the computerized measurement and control devices, thus forming a new network integrated full distributed control system - Fieldbus control system FCS (FiledbusControl System). In a factory production network, devices that can be connected via a fieldbus are collectively referred to as "field devices/meters." From a systemic point of view, industrial robots can also be classified as field devices as one of the production facilities of the factory. The introduction of fieldbus technology in the robot system is more conducive to the integration of robots in industrial production environments.
The advantages of the distributed control system are: the system flexibility is good, the risk of the control system is reduced, and the decentralized control of the multi-processor is adopted, which is beneficial to the parallel execution of the system functions, improves the processing efficiency of the system, and shortens the response time.
For industrial robots with multiple degrees of freedom, centralized control deals well with the coupling relationship between the various control axes and can be easily compensated. However, as the number of axes increases to make the control algorithm complex, its control performance deteriorates. Moreover, when the number of axes or control algorithms in the system becomes complex, it may lead to a redesign of the system. In contrast, each motion axis of the distributed structure is processed by a controller, which means that the system has fewer inter-axis mismatches and higher system reconfiguration.
Heater Thermostat,Cooler Thermostat,Us Type 120V Infrared Heating Thermostat,Us Type 15A Infrared Heating Thermostat
Yuyao Huijun Electrical Appliance Co., Ltd. , https://www.yyhjdq.com